Abstract: This lecture overviews neural semantic 3D world modeling and mapping that has many applications in 3D world mapping and in attaching semantics to the world maps It covers the following topics in detail: neural disparity/depth estimation and joint 3D scene geometry and semantics estimation. Their results are then transferred in semantic 3D world maps (e.g., semantic octomaps). Dynamic and static semantic map annotations (e.g., no flight zones, crowd areas) are also attached to such 3D world maps as KML documents.
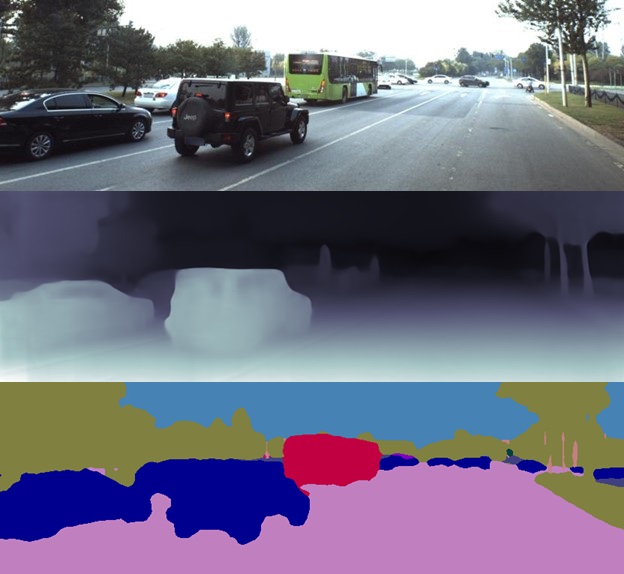
Neural depth image estimation and semantic image segmentation from monocular video.